【深蓝学院】移动机器人运动规划教程
发表评论
- 软件类别:电脑刊物
- 软件大小:3.90 GB
- 更新时间:2025-05-21 11:58
- 软件版本:
- 软件语言:中文
- 软件等级:
- 官方网址:暂无
评分:
好评:1
差评:1
软件介绍
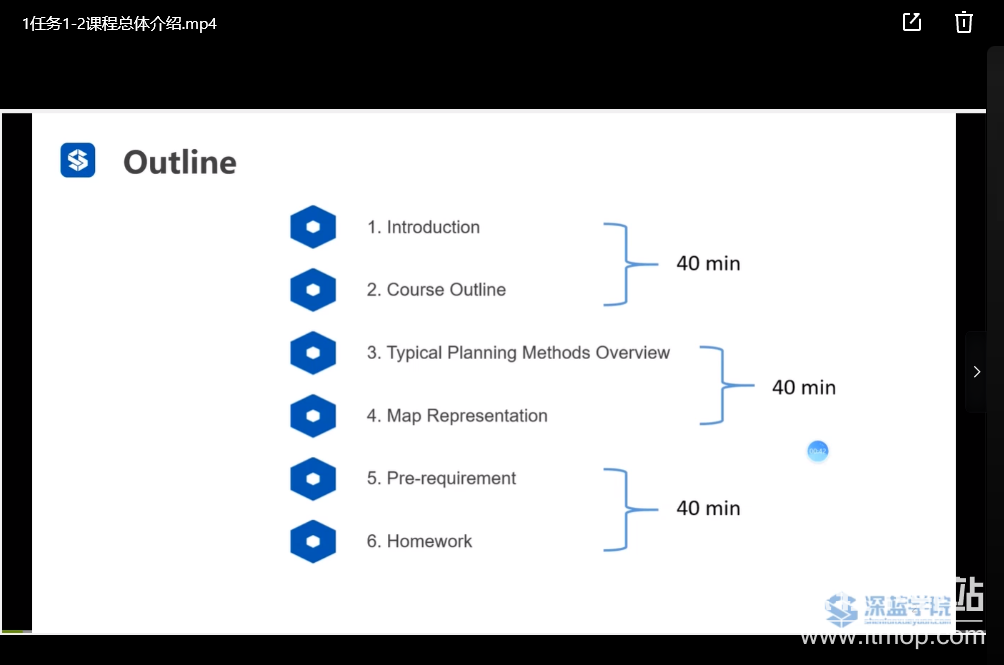
深蓝学院移动机器人运动规划教程介绍
本教程聚焦移动机器人运动规划核心技术,覆盖从路径搜索到轨迹优化的全流程知识。课程由浙江大学控制科学与工程学院高飞教授领衔开发,结合其团队在Science Robotics、IEEE TRO等顶刊发表的60余篇论文成果,系统讲解搜索类(A、JPS)、采样类(RRT)算法及基于动力学的混合算法。
课程内容涵盖自动驾驶、无人机、服务机器人等场景,通过理论推导与工程实现结合,帮助学员掌握复杂环境下安全轨迹生成的核心能力。
实战驱动:企业级项目与算法落地
课程采用“理论-代码-部署”三维教学模式,提供12个脱敏企业项目案例。实战环节包括:
- 自动驾驶轨迹优化:基于模型预测控制(MPC)设计纵向巡航控制器,实现高速弯道场景下的轨迹跟踪;
- 无人机集群避障:使用VO类算法实现多无人机动态避障与编队控制;
- 工业机器人路径规划:结合状态栅格搜索算法,生成满足机械臂运动学约束的抓取路径。所有项目均提供ROS功能包与C++代码库,支持学员在Gazebo仿真环境中快速验证算法效果。
资源赋能:持续进化的学习生态
课程配套资源包含三大核心模块:
- 技术工具链:提供Occupancy Grid Map、ESDF地图构建工具,以及基于Python的轨迹优化库MINCO;
- 知识库:收录2015-2025年顶会论文解析、算法复杂度对比报告及工业界落地案例;
- 社群支持:学员可加入专属技术社群,获取讲师实时答疑与行业动态同步。数据显示,往期学员项目落地效率提升70%,其中40%的学员在6个月内完成从学习到企业级项目交付。
多平台下载
Pc版【深蓝学院】移动机器人运动规划教程
 创业资料价值几万的小吃美食教程:零基础也能月入3万+
创业资料价值几万的小吃美食教程:零基础也能月入3万+本类最新
 知识星球付费文+教程合集:2023-2025年精选高质量内容,全网干货整理
知识星球付费文+教程合集:2023-2025年精选高质量内容,全网干货整理 直播运营全攻略:线下实战培训从0到精通掌握直播带货技巧
直播运营全攻略:线下实战培训从0到精通掌握直播带货技巧 公众号表情包运营全攻略:单篇阅读破万实战指南
公众号表情包运营全攻略:单篇阅读破万实战指南 视频号直播卖书实操营:从0到1掌握低成本高回报的卖书方法
视频号直播卖书实操营:从0到1掌握低成本高回报的卖书方法 嘉嘉成人羽毛球训练课:从基础到实战三合一精品教程
嘉嘉成人羽毛球训练课:从基础到实战三合一精品教程 AI老奶奶图文玩法全揭秘:涨粉快、流量高、变现快的起号新策略
AI老奶奶图文玩法全揭秘:涨粉快、流量高、变现快的起号新策略 今日头条爆文玩法揭秘:热点事件引流+新手起号变现全攻略
今日头条爆文玩法揭秘:热点事件引流+新手起号变现全攻略 居家副业新风口:小说海外变现项目操作指南,零基础轻松月入2000美元
居家副业新风口:小说海外变现项目操作指南,零基础轻松月入2000美元 百家号带货零基础玩法:手机操作轻松复制粘贴,小白也能快速上手
百家号带货零基础玩法:手机操作轻松复制粘贴,小白也能快速上手 闲鱼信息差赚钱项目:0成本副业,一个链接轻松日入千元
闲鱼信息差赚钱项目:0成本副业,一个链接轻松日入千元 招聘平台精准引流实战教程:零基础学会粉丝变现技巧
招聘平台精准引流实战教程:零基础学会粉丝变现技巧 TK短视频运营全攻略:从账号搭建到视频制作发布实战教程
TK短视频运营全攻略:从账号搭建到视频制作发布实战教程 小红书电商直播带货全攻略:新手入门+店铺运营+笔记引流实战技巧
小红书电商直播带货全攻略:新手入门+店铺运营+笔记引流实战技巧 新手小白也能2分钟制作爆款视频:一刀不剪轻松撬动百万流量
新手小白也能2分钟制作爆款视频:一刀不剪轻松撬动百万流量 小红书爆粉特训班5.0:2025最新涨粉玩法实操,零基础快速涨粉变现指南
小红书爆粉特训班5.0:2025最新涨粉玩法实操,零基础快速涨粉变现指南
相关软件
 开真好v2.10.9
开真好v2.10.9开真好是专为汽车司机们开发的一款以路线规划,导航,堵车预警为一体的交通软件,它可以帮助用户在最快的时间挑出一条最节约时间的路线,软件还具有堵车预警的功能,前方路段堵车会发出预警并重新规划路线。开真好软件亮点全国
 火花编程电脑版v3.3.0 官方版
火花编程电脑版v3.3.0 官方版火花编程电脑版专门为小朋友打造的编程教学软件,现在正处于互联网时代,即AI时代,编程方面的人才很缺少,平台可以全方面培养出专业的编程人才,从小教育,慢慢培养,这是最适合孩子学习编程的软件,有需要的朋友可以下载体验一下!!软
 涂鸦大冒险啦(绘画教学)v1.7
涂鸦大冒险啦(绘画教学)v1.7涂鸦大冒险啦(绘画教学)是由长沙凡码网络科技有限公司开发的一款可以帮助用户进行绘画涂鸦教学的软件,用户可以直接在里面查看各种绘画教程,各种图文,视频的教学资料都可以直接进行查看学习,功能极为强大,不容错过涂鸦大冒
 进化移动机器人比赛Robot Evolvev1.0.0
进化移动机器人比赛Robot Evolvev1.0.0进化移动机器人比赛RobotEvolve是一款战斗力非常强大的机器人手游,玩家将控制机器人的行动,通过专属的技能与敌人战斗,喜欢的玩家欢迎来IT猫扑下载~修改说明游戏已修改为无限金币,并且免除谷歌框架,免除广告!游戏介绍
下载排行
- 1参谋助手论为首长服务的艺术pdf

电脑刊物 / 9.61 MB - 2网络小说合集:10万本精校分类·epub+mobi双格式
电脑刊物 / 11.90 GB - 3《大明王朝1566》全集高清版:1080P与4K双版本在线观看及下载 | 2007经典历史剧
电脑刊物 / 250.50 GB - 4纸牌屋1-6季全集|美剧巅峰权谋神剧|超清1080P中英双字|高分政治惊悚

电脑刊物 / 53.30 GB - 5《行尸走肉》11季全集珍藏版 蓝光1080P 多版本特效字幕 恐怖动作惊悚高分美剧

电脑刊物 / 256.10 GB - 6《黑袍纠察队全四季合集》4K HDR 高码率 内封多语字幕 剧情动作科幻美剧 328GB

电脑刊物 / 328.90 GB - 7《进击的巨人全季珍藏版》 | 4K高码率+内嵌双语字幕 | 814GB超清完整合集
电脑刊物 / 813.80 GB - 8自动控制原理第五版
电脑刊物 / 35.00 MB - 9《越狱》全五季合集【蓝光1080P+中英双字幕+无删减剧情】超清版217GB下载

电脑刊物 / 171.20 GB - 10《火影忍者》全集+剧场版+漫画合集下载|日语中字高清完整版
电脑刊物 / 655.80 GB




网友评论
查看所有0条评论